Metrics
If you would like to learn more about the metrics collected by the DANU system or need to review definitions, please refer to our glossary below.
A metric glossary on all metrics collected by the Danu system will be available here soon.
Work in progress.
The Gait Cycle
The Gait Cycle
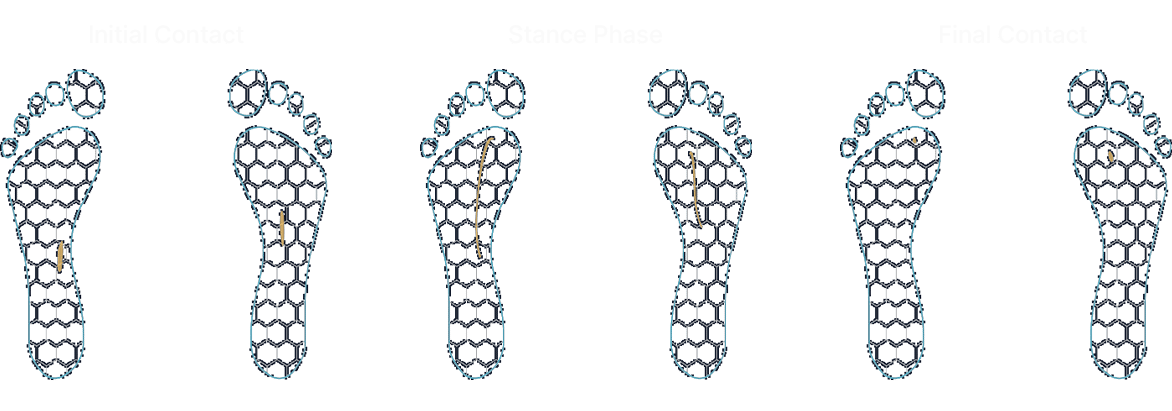
Human gait can be described as a cyclic pattern of movements which advances an individual’s position. The gait cycle consists of two main phases: stance and swing. The stance phase typically occupies 60% of the total walking gait cycle [1], during which some part of the foot is in contact with the ground. The swing phase occupies 40% of the total walking gait cycle [1], during which the foot is not in contact with the ground and the bodyweight is borne by the other leg and foot. This ratio is flipped when looking at jogging or sprinting, where stance phase on average is around ~40% of the gait cycle, and swing phase is around ~60% [2]. To identify the time the foot is in contact with the ground, we need to find initial contact and final contact and forms the base of calculating all temporal metrics.
Gait Cycle In-Depth
The stance phase can be split into further sub phases, beginning with ‘initial contact’, so the moment the foot touches the ground. This is followed by the ‘loading response’, a phase where the body begins to transfer weight onto the leading foot. ‘Mid stance’ occurs as the body’s weight moves directly over the supporting limb, providing stability at the midpoint of the stance phase. ‘Terminal stance’ marks the point where the foot begins to lift off the ground, propelling the body forwards. The stance phase finally ends with ‘Toe-off’, the point when the foot completely leaves the ground.
The swing phase can be split into three sub phases, the first being ‘initial swing’, where the foot lifts from the ground and the leg starts to move forward. During ‘mid swing’, the foot moves directly beneath the body as the leg continues to advance. The phase culminates in ‘terminal swing’, preparing the foot for the next contact with the ground at the start of the new cycle.

Gait Cycle In-depth
The Gait Cycle
Human gait can be described as a cyclic pattern of movements which advances an individual’s position. The gait cycle consists of two main phases: stance and swing. The stance phase typically occupies 60% of the total walking gait cycle [1], during which some part of the foot is in contact with the ground. The swing phase occupies 40% of the total walking gait cycle [1], during which the foot is not in contact with the ground and the bodyweight is borne by the other leg and foot. This ratio is flipped when looking at jogging or sprinting, where stance phase on average is around ~40% of the gait cycle, and swing phase is around ~60% [2]. To identify the time the foot is in contact with the ground, we need to find initial contact and final contact and forms the base of calculating all temporal metrics.
Gait Cycle In-Depth
The stance phase can be split into further sub phases, beginning with ‘initial contact’, so the moment the foot touches the ground. This is followed by the ‘loading response’, a phase where the body begins to transfer weight onto the leading foot. ‘Mid stance’ occurs as the body’s weight moves directly over the supporting limb, providing stability at the midpoint of the stance phase. ‘Terminal stance’ marks the point where the foot begins to lift off the ground, propelling the body forwards. The stance phase finally ends with ‘Toe-off’, the point when the foot completely leaves the ground.
The swing phase can be split into three sub phases, the first being ‘initial swing’, where the foot lifts from the ground and the leg starts to move forward. During ‘mid swing’, the foot moves directly beneath the body as the leg continues to advance. The phase culminates in ‘terminal swing’, preparing the foot for the next contact with the ground at the start of the new cycle.
Ground Contact Time
The Gait Cycle
Human gait can be described as a cyclic pattern of movements which advances an individual’s position. The gait cycle consists of two main phases: stance and swing. The stance phase typically occupies 60% of the total walking gait cycle [1], during which some part of the foot is in contact with the ground. The swing phase occupies 40% of the total walking gait cycle [1], during which the foot is not in contact with the ground and the bodyweight is borne by the other leg and foot. This ratio is flipped when looking at jogging or sprinting, where stance phase on average is around ~40% of the gait cycle, and swing phase is around ~60% [2]. To identify the time the foot is in contact with the ground, we need to find initial contact and final contact and forms the base of calculating all temporal metrics.
Gait Cycle In-Depth
The stance phase can be split into further sub phases, beginning with ‘initial contact’, so the moment the foot touches the ground. This is followed by the ‘loading response’, a phase where the body begins to transfer weight onto the leading foot. ‘Mid stance’ occurs as the body’s weight moves directly over the supporting limb, providing stability at the midpoint of the stance phase. ‘Terminal stance’ marks the point where the foot begins to lift off the ground, propelling the body forwards. The stance phase finally ends with ‘Toe-off’, the point when the foot completely leaves the ground.
The swing phase can be split into three sub phases, the first being ‘initial swing’, where the foot lifts from the ground and the leg starts to move forward. During ‘mid swing’, the foot moves directly beneath the body as the leg continues to advance. The phase culminates in ‘terminal swing’, preparing the foot for the next contact with the ground at the start of the new cycle.
Jump Height
Jump Height
The method for calculating jump height using flight time is a widely accepted and validated method, using the equation below [14]:
Large text to make the Teeeeeeext Box
graph big enough to read
Large text to make the
This method is widely used on jump mats and by force plate manufacturers as the most accurate method for calculating jump height based on flight time.

Flight Time
Flight Time
Flight Time is simply the total duration a person spends in the air with no ground contact. It begins at the final contact with the ground (take-off) and ends at initial contact (landing), as visualised on the example graph.

Peak Power
Peak Power
The method for calculating peak power is based on Sayers et al. [15] equation for calculating peak power using an individuals body weight and jump height, as shown in equation the equation below:
( Insert Jump Height Equation )( Insert Jump Height Equation )
This method has been validated against force plates and has been shown to provide accurate estimates of peak power. It is a common method used among other wearable devices and jump mats.

Reactive Strength Index
Reactive Strength Index
Reactive Strength Index (RSI) is a metric used to assess an athlete’s explosive strength capabilities, particularly focusing on the efficiency and effectiveness of the stretch-shortening cycle (SSC). The SSC is a natural, elastic response of the muscles, where they elongate (stretch) before immediately contracting (shortening), as seen in variations of jumps. RSI is calculated by dividing the flight time by the contact time during a plyometric activity, such as the drop jump or repeated hops, as shown in equation below:
Large text to make the Text Box
graph big enough to read
Large text to make the

Bibliography
Bibliography
[14] | C. Bosco, P. Luhtanen and P. V. Komi, "A simple method for measurement of mechanical power in jumping," European Journal of Applied Physiology, vol. 50, no. 2, pp. 273-82, 1983. |
[15] | S. P. Sayers, D. V. Harackiewicz, E. A. Harman, P. N. Frykman and M. T. Rosentein, "Cross-validation of three jump power equations," Medicine & Science in Sports & Exercise, vol. 31, pp. 572-577, 1999. |
The Gait Cycle
The Gait Cycle
Human gait can be described as a cyclic pattern of movements which advances an individual’s position. The gait cycle consists of two main phases: stance and swing. The stance phase typically occupies 60% of the total walking gait cycle [1], during which some part of the foot is in contact with the ground. The swing phase occupies 40% of the total walking gait cycle [1], during which the foot is not in contact with the ground and the bodyweight is borne by the other leg and foot. This ratio is flipped when looking at jogging or sprinting, where stance phase on average is around ~40% of the gait cycle, and swing phase is around ~60% [2]. To identify the time the foot is in contact with the ground, we need to find initial contact and final contact and forms the base of calculating all temporal metrics.
Gait Cycle In-Depth
The stance phase can be split into further sub phases, beginning with ‘initial contact’, so the moment the foot touches the ground. This is followed by the ‘loading response’, a phase where the body begins to transfer weight onto the leading foot. ‘Mid stance’ occurs as the body’s weight moves directly over the supporting limb, providing stability at the midpoint of the stance phase. ‘Terminal stance’ marks the point where the foot begins to lift off the ground, propelling the body forwards. The stance phase finally ends with ‘Toe-off’, the point when the foot completely leaves the ground.
The swing phase can be split into three sub phases, the first being ‘initial swing’, where the foot lifts from the ground and the leg starts to move forward. During ‘mid swing’, the foot moves directly beneath the body as the leg continues to advance. The phase culminates in ‘terminal swing’, preparing the foot for the next contact with the ground at the start of the new cycle.
Ground Contact Time
Ground Contact Time
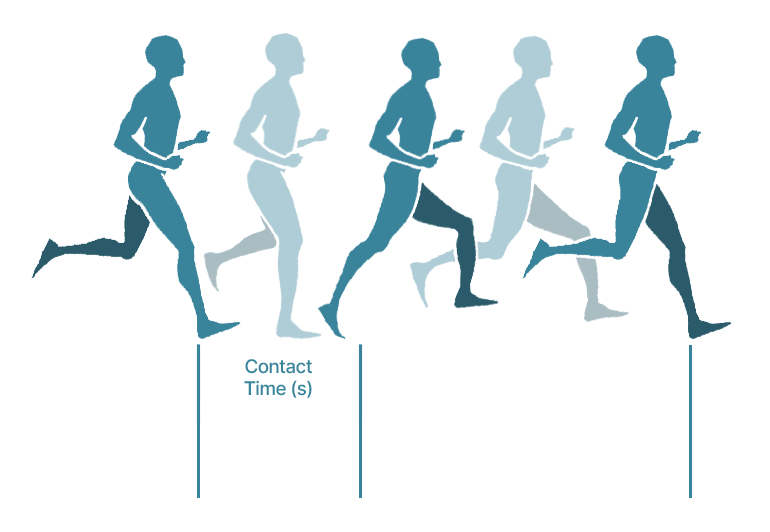
Ground Contact Time (GCT), also known as stance phase, is the amount of time the foot spends on the ground in each stride cycle, defined by initial contact to final contact. It will vary from individual to individual, with walking GCT being longer than running GCT. Within the field of sport, as practitioners are interested in the amount of force an athlete can produce in a short period of time.

Flight Time
Flight Time
Flight Time (FT) refers to the amount of time during a single gait cycle both feet are off the ground and the body is no longer in contact with the ground. This will vary based on speed and can only be measured during running when there is a no support phase. During walking gait, swing time is used instead.

Swing Time
Swing Time
Swing Time (ST) refers to the amount of time during each stride cycle that the foot is off the ground, classified as the time between final contact until initial contact. It will often vary from individual to individual, with walking ST being shorter than running. There is a strong correlation between swing time and increased stride length, specifically when running at submaximal and maximal speeds.

Step Frequency
Step Frequency
Step frequency, often interchangeably used with cadence, is a critical biomechanical parameter in the analysis of athletic performance. It refers to the rate at which an athlete completes a cycle of motion within a given period of time, usually measured in steps taken per minute. Step frequency is inversely related to stride length at a constant speed; as step frequency increases, stride length typically decreases [3].
The number of steps taken per minute (steps/minute). Healthy adults average about 90-120 steps per minute for a comfortable walking speed [4][5].

Stride Frequency
Stride Frequency
Stride Frequency refers to the number of strides an athlete completes within a specific time period, on the Danu portal in strides per second. A stride constitutes a complete cycle of the gait, from terminal contact until the next initial contact of the same foot. This parameter is closely linked to stride length and running speed, influencing the horizontal velocity someone can run at [6].
Peak Tibial Acceleration
Peak Tibial Acceleration
Peak tibial acceleration refers to the maximum rate of change of velocity of the tibia (shin bone) during movement, especially during activities such as walking, running, or jumping. It's a biomechanical parameter that's often measured in units of 'g-forces' (g), where 1 g is equivalent to the acceleration due to gravity on Earth (about 9.81 m/s²). This biomechanical parameter is crucial in understanding the forces exerted on the lower leg and the potential for injury. From a biomechanical perspective, peak tibial accelerations occur due to the dynamic forces acting on the lower leg during the impact phase of foot contact with the ground. When the foot strikes the ground, a force is transmitted through the foot and up the leg, causing the tibia to accelerate rapidly.

Centre of Pressure
Centre of Pressure
Centre of Pressure (CoP) refers to a point on the ground where the total sum of pressure applied by the foot during walking or running is centred. This point represents the average location of the vertical force that the body exerts on the ground, and it shifts through the gait cycle. The CoP begins at the point of contact for initial contact, and shifts throughout the stance phase, and ending at final contact. The CoP’s trajectory and variation can provide insights into various aspects of gait, including symmetry, stride length, and the presence of gait pathologies.
Foot Strike
Foot strike
Foot strike in gait analysis refers to the manner in which the foot contacts the ground during walking, jogging, or sprinting. It marks the beginning of the stance phase, during which the body’s weight is transferred onto the leading leg. There are three primary types of foot strikes, categorised based on the part of the foot that first touches the ground:
- Heel Strike (Rearfoot strike): This is the most common type of foot strike, especially in walkers and recreation runners [7]. Here, the heel makes the initial contact with the ground, typically followed by a rolling forward of the foot towards the toes.
- Midfoot Strike: In a midfoot strike, the foot lands flat, with the heel and ball of the foot contacting the ground simultaneously.
- Forefoot Strike (Toe Strike): Forefoot striking involves the ball of the foot or toes contacting the ground first, followed by the heel coming down. It is often observed in sprinters and in elite long-distance runners [7].

Ground Clearance
Ground Clearance
Ground clearance in gait refers to the vertical distance between the sole of the foot and the ground surface during the swing phase of the gait cycle. In both sports and clinical application, ground clearance is a vital element that intersects with aspects of biomechanics, performance optimisation, and injury prevention [8].

Stride Length
Stride Length
Stride length is defined by the distance between successive initial contacts of the same foot [9] and consist of two step lengths, left and right, each of which is the distance covered by the named foot moves forward in front of the other one. It is a crucial parameter in both gait analysis for health assessment and in sports for performance enhancement. Within the field of sprinting, maximum sprinting speed is a result of an optimal relationship between the step rate and stride length [10].

Step Length
step length
Step length is the distance between the point of initial contact of one foot and the point of initial contact of the opposite foot. Step length is varied on the type of movement an individual is making and measures in the sagittal plane. Unlike stride length, step length can be zero, often seen at the end of a trial where an individual brings both feet together [9]. Step length is strongly correlated with sprint running horizontal velocity with step frequency [11].
Stride Velocity
Stride Velocity
Stride velocity in gait refers to the speed at which an individual walks, measured over each stride, and is the speed the leg moves throughout the swing phase [12]. The two key concepts to understand is mean stride velocity and peak velocity.
- Mean Stride Velocity: This is the average velocity during the swing phase from final contact of one foot until initial contact.
- Peak Stride Velocity: This is the maximum velocity measured during the swing phase, specifically, when the leg is accelerating forwards.
Duty Factor
Duty Factor
Duty Factor is a dimensionless ratio calculated as the proportion of stride time when the foot is in contact with the ground, calculated in the equation below, where higher duty factors reflect a greater relative contribution of the contact phase [13]. It is often used within sports to categorise where someone sits along a continuum from terrestrial (high duty factor) to aerial (low duty factor) running styles.
Large text to make the stinky
graph big enough to read
Large text to make the stinky

Drive Index
Drive Index
This is a dimensionless ratio calculated by:
Large text to make the stinky
graph big enough to read
Large text to make the stinky
Using drive index, coaches are able to classify movement strategies as air-base (low drive index score), ground-based (high drive index score), or a neutral strategy (mid-point drive index value). However, it is crucial to point out no strategy is optimal and each strategy will benefit individuals differently.
Bibliography
Bibliography
[1] | J. Louden, The clinical orthopedic assessment guide., Kansas: Human Kinetics, 2008. |
[2] | J. Dicharry, "Kinematics and Kinetics of Gait: From Lab to Clinic," Clinics in Sports Medicine, vol. 29, no. 3, pp. 347-364, 2010. |
[3] | A. G. Schubert, J. Kempf and B. C. Heiderscheit, "Influence of Stride Frequency and Length on Running Mechanics," Sports Health, vol. 6, no. 3, pp. 210-217, 2014. |
[4] | J. B. Webster and B. J. Darter, "Principles of Normal and Pathological Gait," in Atlas of Orthoses and Assistive Devices, Amsterdam, Elsevier, 2019, pp. 49-62. |
[5] | G. F. Marchetti, S. L. Whitney, P. J. Blatt, L. O. Morris and J. M. Vance, "Temporal and spatial characteristics of gait during performance of the Dynamic Gait Index in people with and people without balance or vestibular disorders," Physical Therapy, vol. 88, no. 5, pp. 640-651, 2008. |
[6] | J. Bailey, T. Mata and J. A. Mercer, "Is the Relationship Between Stride Length, Frequency, and Velocity Influenced by Running on a Treadmill or Overground?," International Journal of Exercise Science, vol. 10, no. 7, pp. 1067-1075, 2017. |
[7] | M. Shorten and E. Pisciotta, "Running Biomechanics: What did we miss?," in Conference of the International Society of Biomechanics in Sports, Cologne, 2017. |
[8] | B. Mariani, C. Hoskovec, S. Rochat, C. Bula, J. Penders and K. Aminian, "3D gait assessment in young and elderly subjects using foot-worn inertial sensors," Journal of Biomechanics, vol. 43, no. 15, pp. 2999-3006, 2010. |
[9] | S. Dhiman, "A Review of Gait Cycle and its Parameters," International Journal of Computational Engineering & Management, pp. 78-83, 2011. |
[10] | J. Schiffer, "The Sprints," New Studies in Athletics, vol. 24, no. 1, pp. 7-17, 2009. |
[11] | K. Mattes, S. Wolff and S. Alizadeh, "Kinematic Stride Characteristics of Maximal Sprint Running of Elite Sprinters - Verification of the "Swing-Pull Technique"," Journal of Human Kinetics, vol. 77, pp. 15-24, 2021. |
[12] | C. Mitschke, P. Kiesewetter and T. L. Milani, "The Effect of the Accelerometer Operating Range on Biomechanical Parameters: Stride Length, Velocity, and Peak Tibial Acceleration during Running," Sensors, vol. 18, no. 1, p. 130, 2018. |
[13] | B. Hanley, C. B. Tucker, L. Gallagher, P. Parelkar, L. Thomas, R. Crespo and R. J. Price, "Grizzlies and gazelles: Duty factor is an effective measure for categorizing running style in English Premier League soccer players," Frontiers in Sports and Active Living, vol. 4, 2022. |
Gait
Gait

Plyometrics
Plyo

Balance
Gait
Plyo